



3.2功能实现
段位置定位主要有三个动作:点动、找原点、定长运行。
3.2.1点动功能
点动功能的实现我们利用运控控制模块中的速度模式模块来实现:

驱动器在使能之后,X9或X10导通,此时将相对应的电机点动正转或反转速度赋值给R100寄存器,M110和M109常闭触点断开,电机即开始运转,一旦X9和X10都断开,电机立即加速停机。ATm和DTm为加减速时间,用户可以根据要求进行设置。
3.2.2原点回归功能
原点在位置定位功能中很重要,可以说是位置定位的基础,原点不精准位置定位将受到影响。运控A9系列伺服现封装了8种找原点模式,根据不同的场合可以选用不同的找原点模式,功能模块见下图:
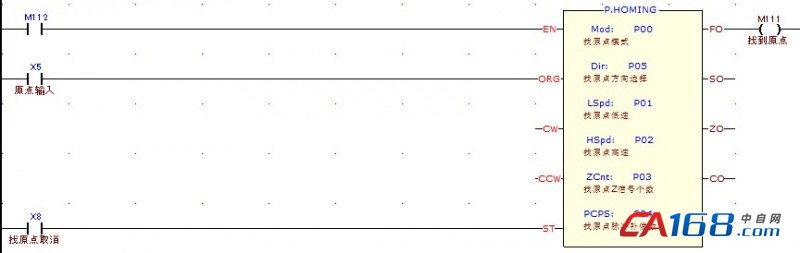
PLC参数P00为模式选择、P01为找原点低速速度、P02为找原点高速、P03为找原点补偿Z信号个数、P04为找原点补偿脉冲数、P05找原点方向;
遇到特殊情况时可以导通X8信号取消当前原点回归动作;原点复归完成时,M111输出高电平。
同时,找到原点后,需将"编码器位置累加器"R2021寄存器清零:

有了"编码器位置累加器"之后,可以方便我们随时控制电机的运行进程,即便是运行中暂停电机运转,我们也可以随时知道还有多少行程未运行完,当然也可以让电机继续未完的行程。
3.2.3多段位置定位功能
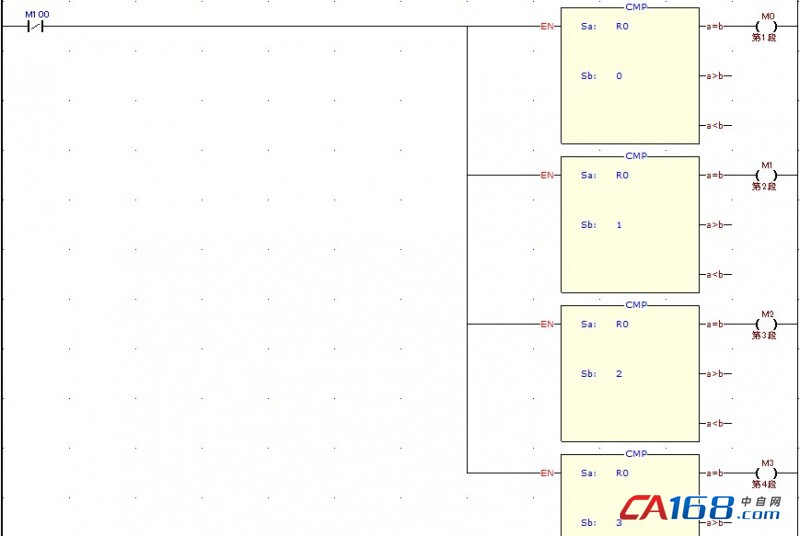
通过对5个信号输入口进行8421编码我们可以方便知道当前选择的段编号:

其中,"BITWR"模块为位元数据写入指令。有了R0寄存器之后,我们就可以通过R0寄存器数值的不同进行判断为第几段:
根据不同的段号,载入相应的行程脉冲数和速度:
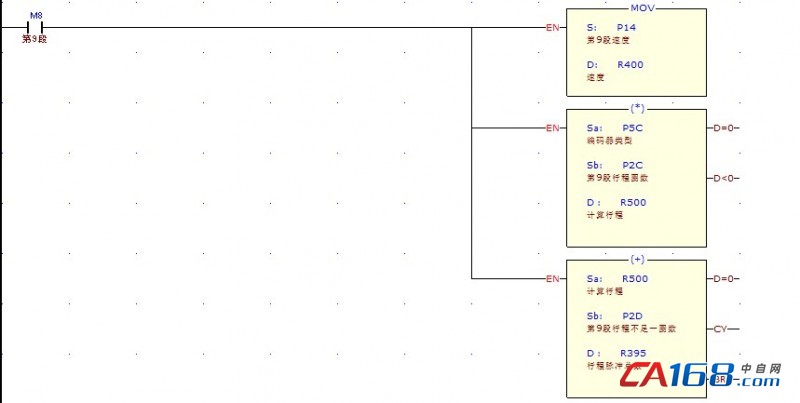
将这些行程和速度都赋予到定长模块中去:
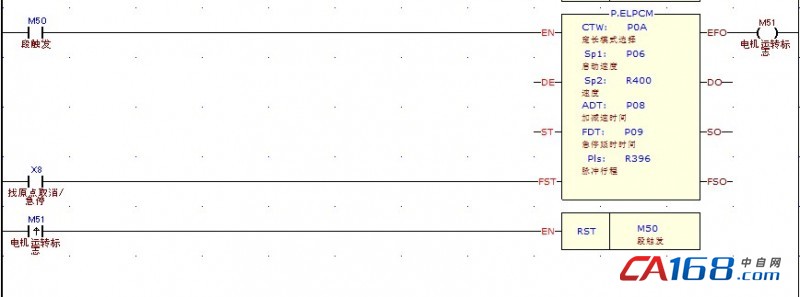
ELPCM模块中P0A参数为模块ID和运动方式选择,P06为定长模式启动速度,R400为定长最高速度,P08为加减速时间,P09为急停减速时间,R396当前行程脉冲数。
需要注意的是,ELPCM模块在程序中允许有多个,需要以不同的ID加以区分,不能重复ID,并且ELPCM是触发型模块,因此模块前加了"P"标志,如上图中所示,M50导通后,ELPCM模块开始执行,在此期间M50如果始终是高电平,ELPCM模块即使运行完当前段,模块也不会重复运行此段,而是需要重新对M50再次给一个高电平的触发信号,ELPCM模块才会再次运行,正如程序中,一旦M51开始为高电平时,即对M50复位,复位后,我们就可以对模块中的数据重新加载,一旦需要当前段运行完毕,我们就可以利用M51的下降沿再次触发M50。
3.2.4主要IO口的控制
使能信号的控制及其制动器信号输出:

其中,M1904为伺服真正使能标志,一般来说,请求M1846伺服ON大约50ms后M1904使能标志才生效。
原点复归完成信号输出:

找到原点之后最重要的是要将"编码器位置累计值"清零,这样做的意义在于运动模式为绝对位置模式时,无论电机怎么动甚至是脱机,电机呈自由状态时一旦位置定位一来,电机就会运行到你所指定的位置。
报警、定位完成、伺服准备好信号输出:

伺服系统本身提供了M1892--伺服报警状态位、M1890--伺服定位完成状态位、M1894--伺服准备好状态位,有了这些状态位我们就可以清楚的知道伺服当前所运行的状态。
4 结束语
我们利用伺服内置PLC引擎可以轻松完成二次开发,多种控制模式的随意切换、多种控制模式协同配合在这普通伺服上是不可想象的。友好的界面风格及其标准的梯形图和功能模块能让更多用户参与进来,"傻瓜式"的电机运动控制指令和丰富的电机状态指示标志能帮助用户对电机的控制随心所欲。
作者简介
程健(1975-)男 资深应用工程师,现就职于珠海运控电机有限公司,长期从事伺服控制技术的应用研究。




共0条 [查看全部] 网友评论