


基于大众、斯柯达两大汽车品牌,公司目前拥有Polo、Touran途安、Lavida、Tiguan途观、Santana桑塔纳、Passat帕萨特和Fabia晶锐、Rapid、Yeti野帝、Octavia明锐、Superb速派等系列产品,覆盖A0级、A级、B级、SUV、MPV等不同细分市场。
上海大众南京分公司是上海大众汽车的主要生产基地之一,工厂全面采用上海大众先进成熟的工艺技术,以及生产制造、质量控制等管理体系。冲压车间采用先进的全自动化冲压生产线,冲压20线使用了一模双件(含内外覆盖件)、一模四件的设计理念,极大地提高了生产效率。车身车间采用了先进的激光焊接技术、高度自动化的机器人焊接等技术。总装车间采用了先进的模块化生产方式以及先进的整车检测系统,确保了轿车制造质量稳定可靠。
在总装车间,过去汽车蓄电池的装配都是通过人工搬运的方式来进行,不但效率低下,而且严重影响生产节拍,甚至会出现员工不小心砸伤自己的情况。因此,必须采用先进的视觉技术来改进汽车蓄电池的作业方式。
应用视觉系统对汽车蓄电池型号区分和定位的作业流程是:1)蓄电池分布在托盘上,呈5层排列,叉车工需要通过叉车把蓄电池从货车中取出放到指定位置,机器人通过视觉定位每个托盘上的蓄电池,进行定位抓取,然后把不同型号的蓄电池放入到不同的滑道中,以自动区分型号,为下一步生产做准备;2)视觉系统根据到位的产品,首先通过每个蓄电池上的标识卡片来读取蓄电池型号,来区分产品型号,然后读取区域内的二维码,其次是定位蓄电池的坐标和角度,并把这些数据发送给机器人。
但是,在汽车蓄电池型号区分和定位中,应用视觉系统存在诸多问题:1)产品的表面反光问题,蓄电池表面的标识卡片是人工贴上去的,所以反光区域不确定;2)叉车工在放置托盘的时候,位置不确定问题;3)最后一层的蓄电池颜色和托盘底部的颜色很接近。
这时,一家本土工业机器人厂商ESTUN公司向上海大众南京分公司,就汽车蓄电池的机器人项目推荐了康耐视公司的In-Sight视觉系统。
在测试中,当一批蓄电池从货车上卸下来之后,工人使用叉车把码垛在托盘上的蓄电池放到指定的位置,机器人带动视觉系统到初始位置,机器人给出触发信号,In-Sight 1402视觉系统来找到每个蓄电池的位置。
而要实现机器人的自动抓取,就必须每次把产品的准确位置发给机器人,使机器人调整到准确位置实现自动抓取堆垛。In-Sight产品的PatMax功能很好的解决了这个问题。只要检测的产品在其视野范围内就可以实现准确定位。
康耐视的PatMax图案匹配技术经过编程,可识别托盘中的每个蓄电池,并使用定位器工具来精确确定蓄电池中心的位置。通过检查蓄电池中心的特征以确定中心旋转的角度,字符读取工具可有效的读取蓄电池上的字符。然后,系统将此信息传给机器人的控制器。机器人旋转其腕部使其与蓄电池转动的角度保持一致,接着机器人引导抓手对准蓄电池边界,只需1秒即可把蓄电池稳定抓起。
In-Sight视觉系统在现场应用中的表现给上海大众的技术人员带来了全新的感觉,“我们在汽车蓄电池定位上使用了In-Sight 1402视觉系统之后,均出色的完成了定位抓取工作,”他们说道,“令人感到震惊和放心的是——我们甚至在白天和晚上的情况下只做简单的遮挡,视觉系统都可以稳定的实现定位抓取工作。”
上海大众的技术人员进一步指出,“In-Sight视觉系统先进的几何图案匹配技术给了我们很大惊喜,无论元件对比度变化、照明变化、图像焦距变化、外观质量下降、多个元件还是部分隐藏的元件读取问题,In-Sight视觉系统均能灵活处理。”
“PatMax技术把产品的横坐标、纵坐标及角度偏移量发给机器人,就好像为机器人提供了一双眼睛,让机器人能够高效准确的抓取产品,”康耐视的技术工程师表示,“PatMax的自动定位功能是其他视觉产品所不具有的。”
另外,In-Sight视觉系统所含有的标准通信协议模块,能够很轻松的与市场上任何一家机器人厂商(包括国产机器人)进行快速的通信工作。对于自动化行业中所支持的TCP/IP协议、串口、现场总线、标准以太网/IP协议等,In-Sight视觉系统都能轻松应对。同时康耐视还提供驱动器的模板和脚本文件等辅助功能,可以快速建立通信通道。
In-Sight视觉系统还可使用读码器所提供的电子数据表(EDS)文件,通过以太网/IP标准轻松连接到机器人和其他常见的工厂自动化设备。第一步是将EDS文件下载到机器人编程软件中。EDS文件是简单的文本文件,由网络配置工具使用,以帮助识别产品,并在网络上对它们进行调试。然后,EDS文件会给读码器分配一个标签,其包含读码器的唯一名称和IP地址。最后一步是定义输入和输出节点。然后,工程师就可以在熟悉的机器人软件环境中编写应用,并定义相关的逻辑。
“采用了In-Sight视觉系统配合机器人工作后,其效果大大超过了我们的想象,不但操作简单,而且稳定性极高。”上海大众的技术人员指出,“同时其软件通信接口可以很方便的与机器人通信接口对接,整个调试过程非常顺利。”
现在,利用机器视觉来引导机器人实现定位抓取的自动化应用,不但将上海大众的工人们从困难和危险性较大的工作中解脱出来,同时也大大提高了工作效率。“机器人加视觉的应用,解放了人力,”上海大众的技术人员最后强调,“我们公司会一如既往的坚持自动化水平的改善,已达到整个生产结构的改造。”
图片:

产品来料时的情况
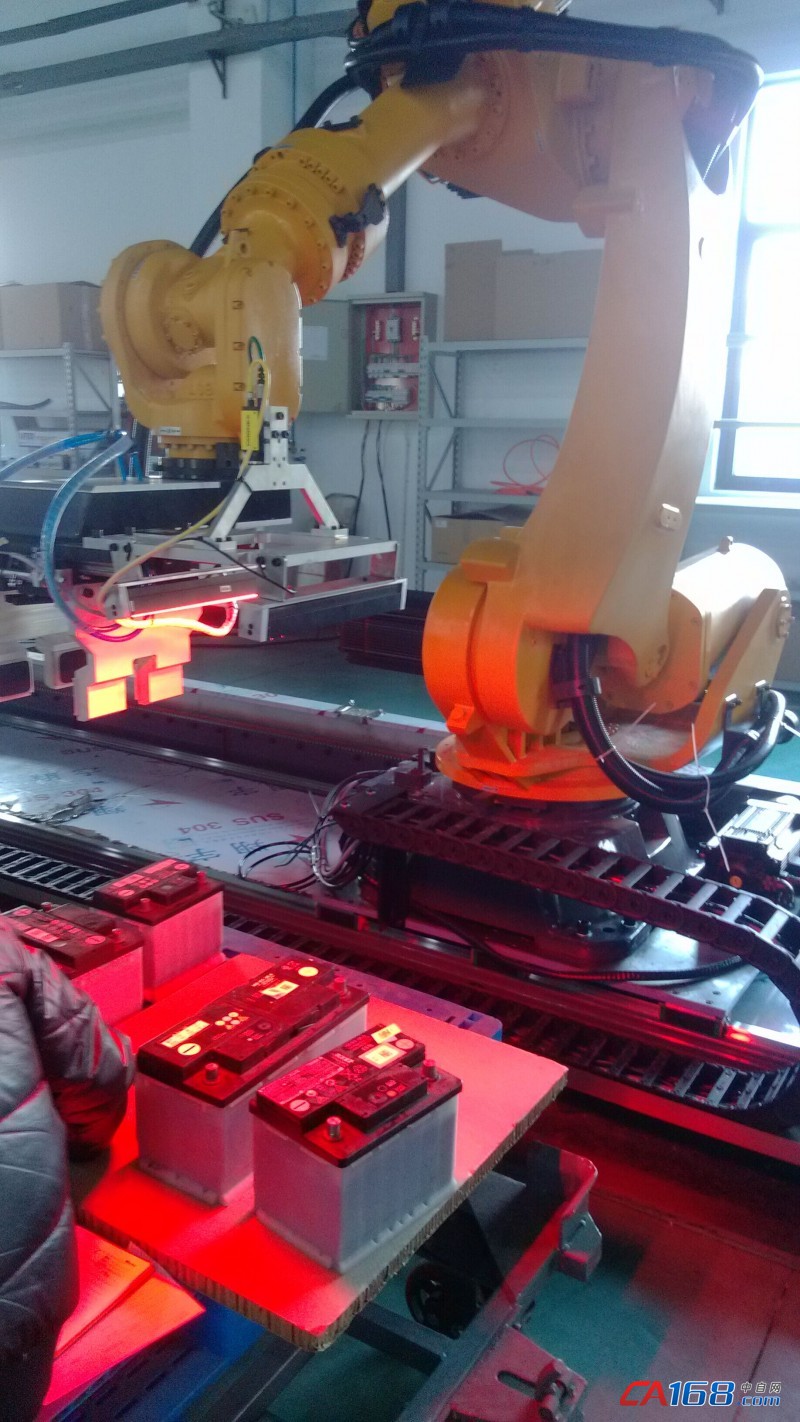

机器人和视觉工作的状态


程序调试显示图片




共0条 [查看全部] 网友评论