


1 引言
传统的电气设备已经满足不了现代化安全性能的要求,更加智能的电气化设计系统已经成为主流的发展方向[1],目的是让机器安全在智能制造中扮演着重要的角色。机器安全不仅能使制造商满足合规要求,而且能够帮助制造商提高生产效率。在机器安全方面做得好的安全系统设计可以提高5%-7%的设备总体效率、减少2%-4%的非计划停机、并减少一半安全事故[2]。
2 机器人推盘堆垛机应用场景安全等级的确定
2.1推盘堆垛机场景实例分析
机器人推盘堆垛机在工厂运输物料板的场景如图1所示

图1 场景应用图
在No1阶段是进料传送带机器人工作单元入口点。1,太阳能板产品经过剪切后,由进料传送带运送至机器人工作单元;2,操作员和维护人员不允许从该处进入机器人工作单元,以免被机器人手臂冲撞而导致伤残,甚至死亡。
在No2阶段是操作员放置包装箱区域。1,操作员将包装箱放置在堆垛区传送带上,由机器人进行最终包装;2,操作员的工作区(长度2米)是开放的,如果操作员在该区域内,机器人应当停机,直到操作员离去;3,为了安全起见,不允许操作员通过此开放门进入机器人工作单元,以免被机器人手臂冲撞而导致伤残,甚至死亡[3]。
在No3阶段是维护人员进出口门。1,维护人员需要定期进入机器人工作单元执行维护任务;2,在进入机器人工作单元之前,为保证安全起见,维护人员必须要在相关的电气控制柜上上锁挂牌(Lock Out Tag Out),待完成维护任务出来后才能解除上锁挂牌[4];3,维护人员在机器人工作单元内执行维护任务时,机器人应当处于停机状态,待维护人员完成维护任务出来后,并且关闭好维护门,操作员才能启动机器人。
在No4阶段是出料传送带机器人工作单元出口点。1,机器人将打包好的包装箱从包装区搬移至出料传送带上运出;2, 操作员和维护人员不允许从该处进入机器人工作单元,以免被机器人手臂冲撞而导致伤残,甚至死亡。
2.2 推盘堆垛机机器人在工作区域的安全等级确定
风险参数:
S 受伤程度 S1 轻伤 S2 重伤
P 避免危险可能性 P1 特殊情况下 P2 几乎不可能
风险等级划分如图2所示
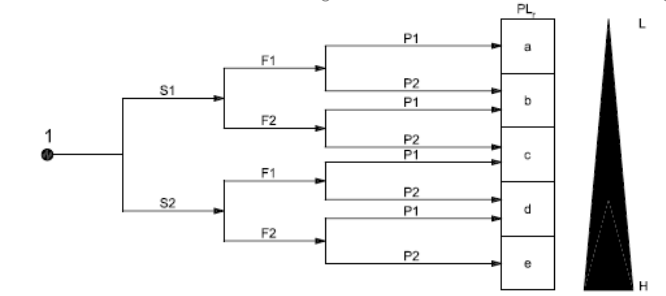
图2 风险等级划分
可以确定这四个危险点所需的安全性能等级PLr如下:
风险点1: S=S2, F=F1,P=P2,所以 PLr=d。
风险点2: S=S2, F=F2,P=P2,所以 PLr=e。 按照机器人标准中规定,可以采用PLr=d的性能等级,故选择PLr=d 做为最终所需的性能等级。
风险点3: S=S2, F=F1,P=P1,所以 PLr=c。 传送带速度很低。
风险点4: S=S2, F=F1,P=P2,所以 PLr=d。
2.3 安全电气设备
安全光幕由一个发射器和一个接收器组成,可在危险区域前方或周围形成多束红外光栅。发射器与接收器通过与外壳一端最接近的光电束进行同步[5]。为消除由于环境光或其它光电设备干扰(串扰)而引起的错误跳闸,以特定频率对发射器中的各 LED 连续施加脉冲,这样发射器只能影响与之关联的特定接收器。
安全激光扫描器器是 type 3光电设备,利用发射的红外线激光的漫反射确定是否有人员或物体闯入定义 的区域。旋转反射镜定期发射1类(人眼安全)红外线激光脉冲,覆盖190°角度区域,以形成二维检测区域。
安全地毯是压敏安全防护产品,旨在用于检测感应表面上是否有人员存在。安全地毯有两个坚硬的导电钢板,被不导电的可压缩隔离物分开。安全地毯上无物体时,控制单元向机器控制电路发送信号。有人员或物体踏上安全地毯时,两个导电金属板互相接触,电路电阻降为零。
使能开关是要在机器防护设备内部作业(例如,安装、维护或故障排除),三位使能开关可作为所需条件的一部分来实现安全作业[6]。此类开关重量轻并具有人体工程学设计,易于使用。
3 Safety Automation Builder(SAB)模型建立及分析
基于罗克韦尔公司的Safety Automation Builder软件对上述流水生产线的场景图进行仿真和添加电气安全设备。建立的模型如图3所示。
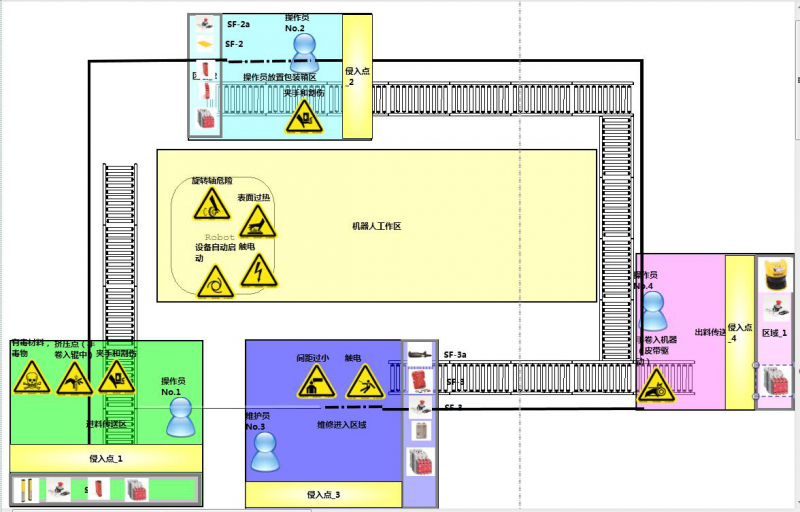
图3 仿真模型
在No.1侵入点处设计方案是:①给工人配备基本的防护用具,如口罩,手套等来解决有毒材料及夹手和割伤的风险。②在传送带附近安装急停开关880FP-MT44,工人一旦手卷入辊中,立即按下急停开关,通过继电器440R-D22R2判断及100S-C16KJ14C(有子系统)的反应使整个区域断电,传送带立即停止工作。③在传送带两侧垂直安装了安全光幕445L-P4S1200YD,一旦人员违规进入,在穿透应用中光幕被切断,通过继电器440R-D22R2判断及100S-C16KJ14C(有子系统)的反应将会向危险区域发送停机命令[7]。
在No.2侵入点处设计方案是:①给工人配备如口罩,手套等工具。②我们在放置包装箱区进口处安装了急停装置880FP-MT44,当事故发生时按下急停装置,通过逻辑设备440R-S12R2作出判断发送断电停止设备的指令到输出设备100S-C16KJ14C并使其做出停电反应使传送带停下来。③在堆垛区安装了440F-M2020BYNN型号的安全地毯。一旦人员违规进入机器人工作区使安全地毯两个导电金属板互相接触,逻辑设备440R-C23139监视到此情况后立即通过输出设备100S-C16KJ14C向机器发送停止信号使机器停止转动,在No.3侵入点处设计方案是:①给维护人员配备防护用具如防触电胶鞋,工作手套等。②我们在维护人员进出口处安装了安全互锁440G-T27121,防止外部人员闯入机器人工作单元。③维护人员进行维护时,要对机器进行调试,必须能随时启动和关闭机械手臂运转,因此我们安装了440J-N21TNPM型号的使能设备通过与互锁开关共用的逻辑设备和输出设备与机械手臂控制端相连,来达到随时控制启动和关闭机械手臂运转来进行维护与测试工作[8]。
在No.4侵入点设计方案是:①在出料传送带机器人工作单元出口处安装442L-SFZNSZ型号的激光扫描器,当有人员想靠近时,激光扫描器便可触发声音报警或激活警告指示灯,以警告闯入的人员或物体。②我们在出料传送带出口处还安装了急停设备880FP-MT44,如果激光扫描器设备损坏,当人员接近出料工作区域接触传送带导致手臂被卷入传送带,可以立即按下即停按钮,危险信息会被送到输出设备100S-C16KJ14C(有子系统)将指令送到中心控制系统,进行断电动作。
4 SISTEMA软件安全性能检验
SISTEMA软件是德国社会意外保险职业安全与健康研究所提供的免费工具软件(如图4所示),而且为开发和测试与安全相关的机器控制的人员提供满足国际标准EN ISO 13849-1的安全评估的全面支持。同时能够自动计算各种安全性能等级(PL)的可靠性数据,通过对Safety Automation Builder仿真文件导入SISTEMA中可以检测安全等级是否符合要求。
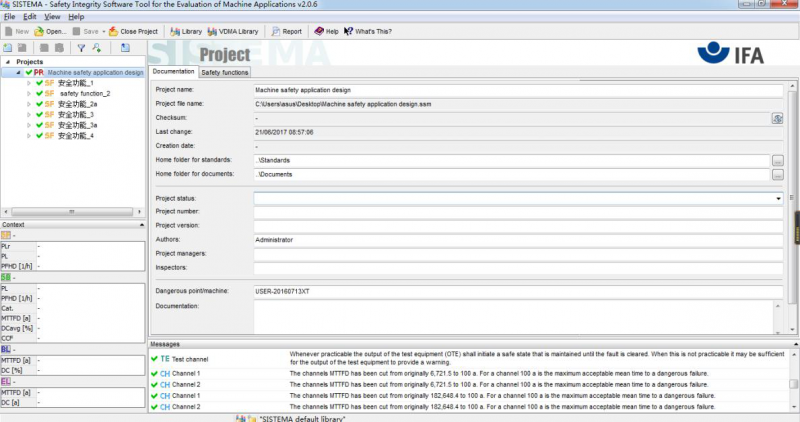
图4 SISTEMA软件评估
检测安全等级符合要求后可得到SISTEMA的安全等级报告,如图5所示
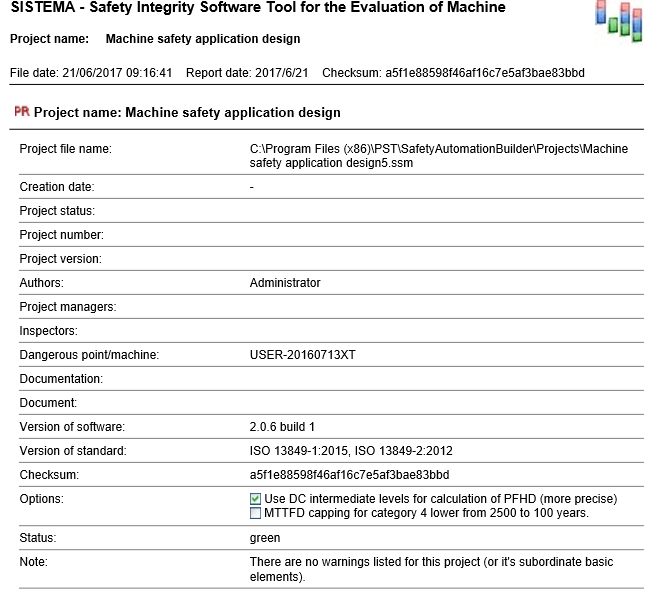
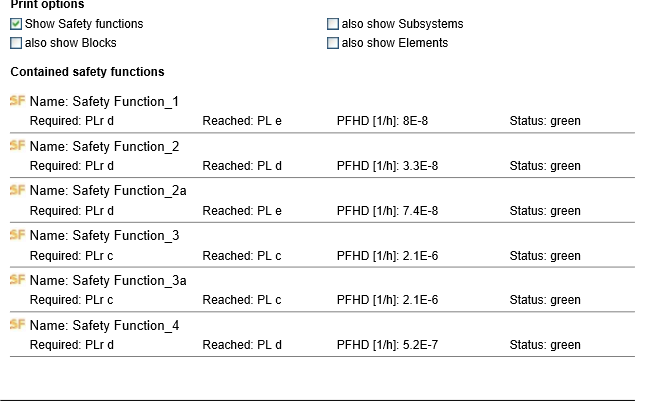
图5 安全评估报告
5 结束语
通过识别和理解机器人在生产中的应用,分析危险区域存在的安全隐患。并.对危险点进行风险评估和安全性能等级的确定[9]。基于罗克韦尔公司Safety Automation Builder(SAB)和SISTEMA对安全系统进行评估达到安全性能要求,基于现代化的输入—逻辑—输出系统的安全防护,可以大大降低操作人员在工作中发生意外的概率[10]。
参考文献
[1] 钱泉,耿贵宁,苏禹,崔翀.智能工厂网络安全体系研究[J].微型机与应用,2017,36(13):1-3+6.
[2] 李磊.罗克韦尔自动化设备应用基本教程[M]. 北京: 机械工业出版社,2013:215-248.
[3]汤煊琳.工厂电气控制技术[M]. 北京: 北京理工大学出版社,2014:315-342.
[4] 梁常出.PLC编程及应用[M]. 北京: 机械工业出版社,2014:56-89.
[5] 钱泉,耿贵宁,苏禹,崔翀.智能工厂网络安全体系研究[J].微型机与应用,2017,36(13):1-3+6.
[6] 陆辰一,顾晓强,陈鑫.基于AB模块的安全控制系统结构探讨与实践[J].轻型汽车技术,2018(Z3):63-68.
[7] 杜健. 基于数字化工厂的自动化立体仓库设计与仿真研究[D].华南理工大学,2018.
[8] 何亮.基于罗克韦尔CompactLogix控制器和Guardmaster 440C-CR30安全控制器的项目开发[J].自动化应用,2018(04):28-29.
[9] 刘治永,张晓飞,程红兵,付卉青.安全控制系统的性能等级与计算案例[J].标准科学,2013(02):30-33+38.
[10] 曹宏,张倩颖.机械加工车间的安全操作性能评估[J].科技与创新,2016(24):1-3.




共0条 [查看全部] 网友评论